

设备 = 计算机与物理世界交互的桥梁
用户需要通过设备来使用计算机
- 触摸屏
- 显示屏
- 扬声器
- 麦克风

- 操作面板: 开关, 按钮等
- 读卡器: 输入指令卡片
- 打印机: 输出数据卡片
设备的内部结构
设备 = 电气部分 + 数字部分(设备控制器)

设备控制器
控制设备工作的部件
- 一侧连处理器, 接收来自处理器的命令
- 接口 = 总线
- 一侧连电气部分, 给电气部分发送命令
- 接口 = 数/模转换芯片或电缆
可以看成一个将处理器的二进制命令翻译成电气信号的部件
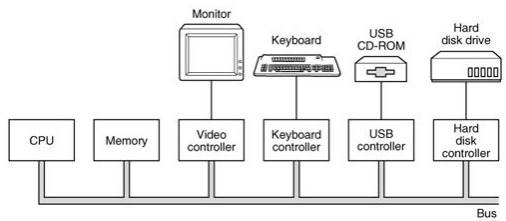
主板和总线
这块主板很老了, 还没有PCI-e(2003年)
- 总线的各种表现形式: 电缆, 插槽, 主板走线, 引脚打线, 芯片内部绕线

芯片封装 - 第三期 “一生一芯”
把芯片的端口信号引出来
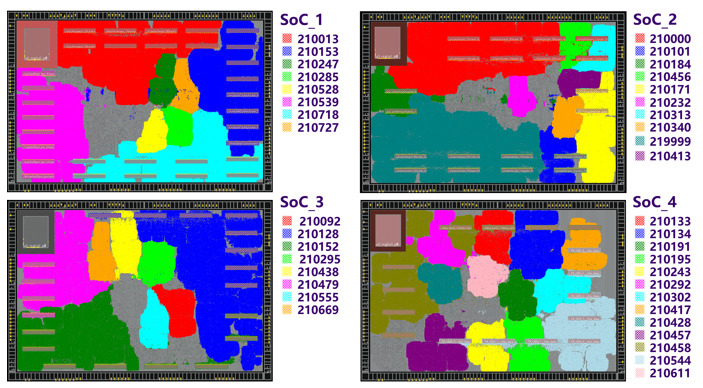
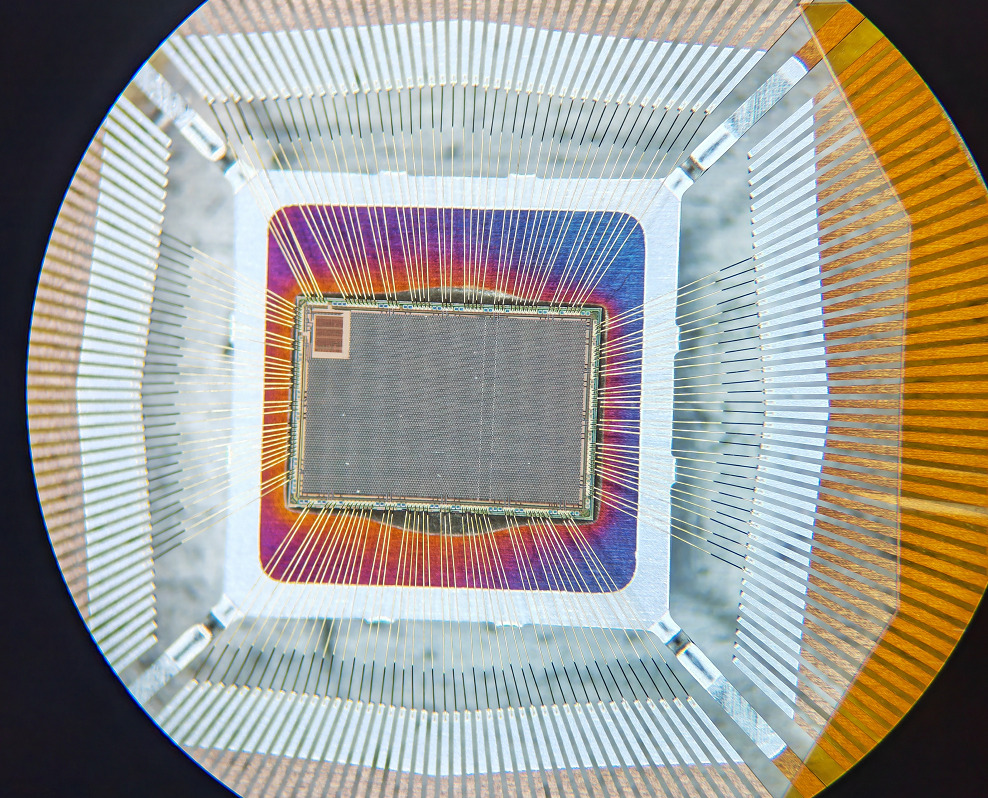
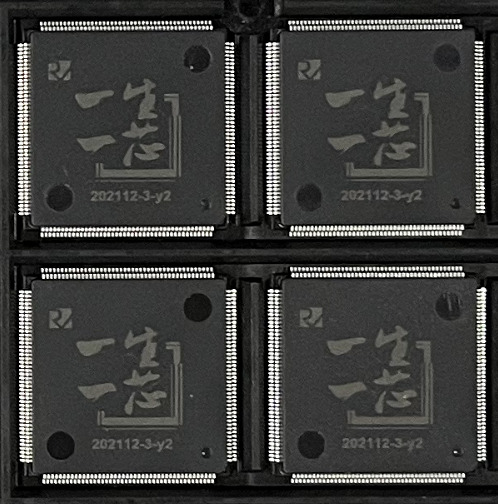

版图 ===生产=> 裸片 ===封装=> 芯片
芯片引脚上的信号通过板卡走线连到设备
- 如flash颗粒的引脚
市场主流主板
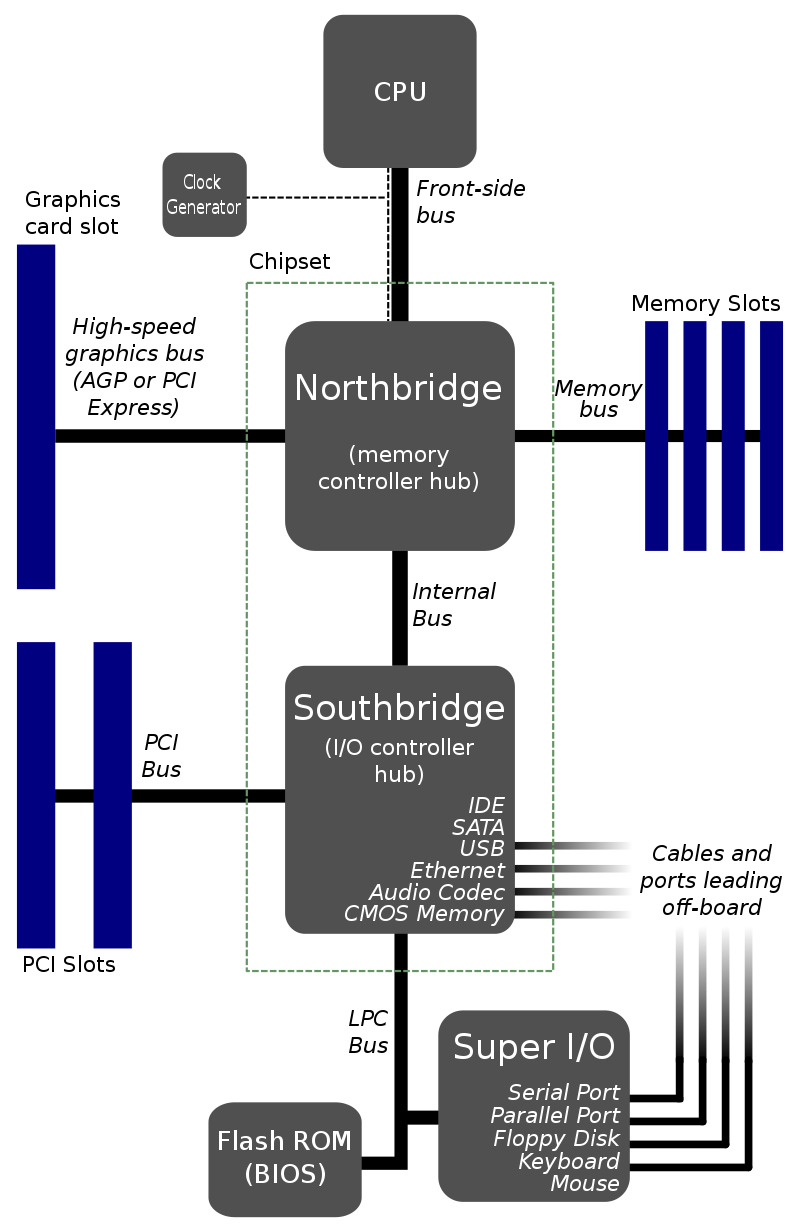
老主板通常配备芯片组: 北桥, 南桥
- 北桥连接高速设备, 如DDR, 显卡, PCI-e等
- 南桥连接低速设备, 如BIOS, 磁盘, USB, 网卡, 声卡等
现在芯片集成度大幅提升
- DDR控制器, PCI-e控制器, 显卡控制器都可以集成到CPU芯片内部了
- 不需要北桥芯片了
- PCI-e/USB流行, 可接入大部分设备
- 连南桥芯片的设备越来越少了
lspci -vt lsusb -vt
设备控制器里面有什么?
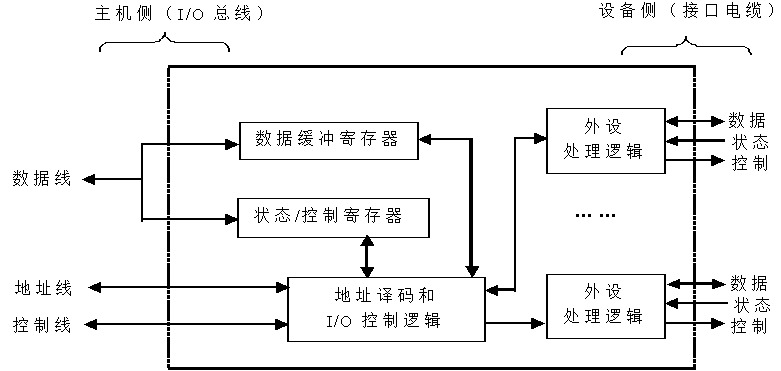
与CPU相关的3个重要功能:
- 数据交换 - 数据缓冲寄存器
- 命令控制 - 控制寄存器
- 状态检测 - 状态寄存器
还可能有很多其他部件:
- 用于控制设备电气部分的逻辑
- 甚至还可能包含处理器, 例如SSD控制器需要进行复杂的存储管理
- 甚至还可能就是处理器, 例如GPU包含多个处理单元以及GDDR
对CPU来说, 这些寄存器就是设备功能的抽象
- CPU只要访问设备寄存器即可控制设备工作, 无需关心设备的内部实现
- I/O控制逻辑会把CPU发送的命令翻译成设备的物理操作
设备功能 = RTFM
Xilinx UART 16550 v2.0 LogiCORE IP Product Guide
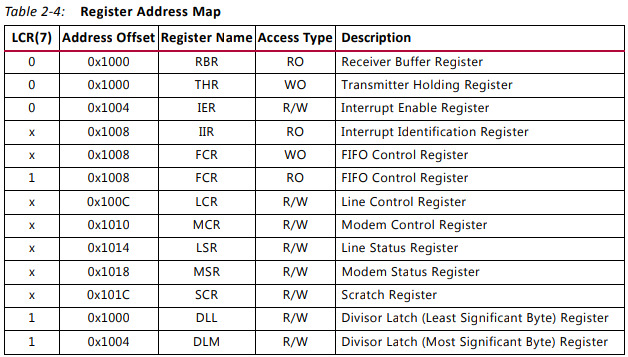
开发者(例如SoC工程师)只需RTFM即可开发底层软件, 无需了解设备的电气特性
MMIO编程
#include <stdint.h>
int main() {
const int BUSY = 0x0;
uint8_t *status = (uint8_t *)(uintptr_t)0x400;
uint8_t *data = (uint8_t *)(uintptr_t)0x404;
while (*status == BUSY); // wait until idle
*data = 0;
return 0;
}riscv64-linux-gnu-gcc -march=rv64g -O2 -c a.c
riscv64-linux-gnu-objdump -d a.o
0000000000000000 <main>:
0: 40004783 lbu a5,1024(zero) # 400 <.L5+0x3f4>
4: 00079463 bnez a5,c <.L5>
0000000000000008 <.L4>:
8: 0000006f j 8 <.L4>
000000000000000c <.L5>:
c: 40000223 sb zero,1028(zero) # 404 <.L5+0x3f8>
10: 00000513 li a0,0
14: 00008067 ret输入输出的状态机模型
挑战: 设备的状态受物理世界的影响, 难以建模
折中: 通过引入状态机的不确定性, 仅对I/O指令的行为进行建模:
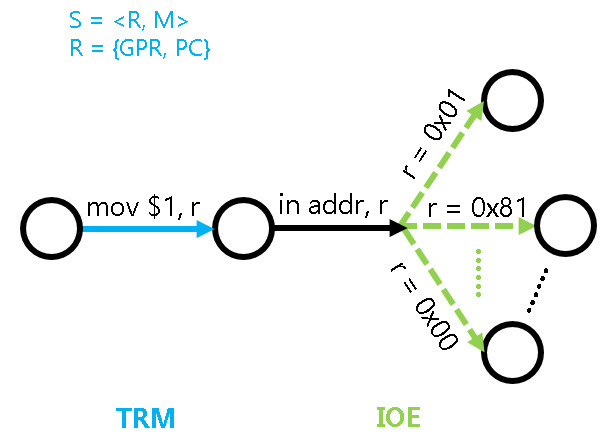
- 执行普通指令时, 按照TRM模型转移状态
- 执行设备输出指令(如x86的out指令或RISC架构的MMIO写指令)时
- 除了更新PC之外, 其他状态均保持不变
- 但设备状态和物理世界会发生相应变化
- 执行设备输入指令(如x86的in指令或RISC架构的MMIO读指令)时
- 状态机的转移将会 “分叉”: 由执行这条指令时设备的状态决定次态
- 如读入的按键取决于用户如何操作键盘: 按下/释放/无按键
- 状态机的转移将会 “分叉”: 由执行这条指令时设备的状态决定次态
GPIO
最简单的设备, 可传输1bit数据, 如拨码开关/LED灯
- 只需实现1bit数据寄存器, 无需额外的状态和控制
- 若输出, 则将该寄存器连到芯片引脚
- 若输入, 则将芯片引脚连到该寄存器
但由于在模拟/仿真环境中不便使用, AM的IOE未提供GPIO的抽象

串口
简单的设备, 可双向传输字符数据
- 接收和发送各需要8bit数据寄存器
- 但传输比CPU慢, 波特率115200几乎是最快
- 再快容易干扰(电气特性)
- 为了缓冲数据, 一般在控制器中实现fifo队列
- 但传输比CPU慢, 波特率115200几乎是最快

RS232接口很少见了, 一般在板卡上放一个转换芯片出USB接口
- 状态寄存器 - 目前是否可发送/接收? fifo是否满/空?
- 控制寄存器 - 设置波特率等
AM的IOE屏蔽大部分细节,
只提供UART_TX和UART_RX两个抽象寄存器
- NEMU/QEMU中的串口无需考虑波特率等电气特性, 永远就绪
键盘
常见的输入设备, 通过电容变化识别按键情况
- 只读数据寄存器, 可读出用户按下/释放按键的键盘码
- 持续按键时会一直发送通码, 释放按键时会发送断码
- 后者与串口不同, 因此串口无法识别是否有多个键同时按下
- 所以用串口当输入设备玩游戏体验会下降 😂
- 软件可通过查一张固定的映射表将键盘码翻译成按键信息
![]()
- 状态寄存器 - fifo中是否有按键信息
- 一些高级的键盘支持更多功能
- 彩虹灯, 呼吸灯, 甚至可编程
AM的IOE只提供KEYBRD抽象寄存器
- 若无按键, 则编码为
KEY_NONE, 省掉状态寄存器
显卡
常见的输出设备, 将像素编码转换为RGB模拟信号在屏幕上显示

- 数据寄存器 - 显存(其实是一段存储器)
- 存放需要显示的像素信息
- 控制寄存器 - 屏幕大小, 渲染命令
- 状态寄存器 - 是否渲染结束
- 真实的VGA控制器支持更丰富的功能(FreeVGA
project)
- 颜色控制, 属性设置, 同步等
AM的IOE提供5个抽象寄存器, 目前只使用其中两个
GPU_CONFIG- 可读出屏幕大小GPU_FBDRAW- 往显存写入矩形区域的像素信息
酷炫的游戏
实现刚才的IOE API就可以运行游戏!
在x86-nemu上运行超级玛丽

第三期 “一生一芯”低配版超级玛丽: 将不同颜色的像素转换成字符
第一期 “一生一芯”演示
- 通过串口操作, 对玩家操作水平要求较高 😂

游戏 = 死循环
while (1) {
wait_for_next_frame(); // TIMER_UPTIME
process_key(); // KEYBRD
process_game_logic(); // TRM
update_screen(); // GPU_FBDRAW
}- 根据FPS决定每帧的时长
- 读入玩家的按键信息
- 结合按键情况和游戏逻辑, 更新物体状态
- 将相应画面显示到屏幕上
这些真的可以通过TRM + IOE来实现!
- 所有的游戏都是这样的死循环, 包括仙剑
- 强烈建议RTFSC打字小游戏, 不到200行代码
酷炫的游戏效果是如何做到的?

全靠计算!

跳帧和优化
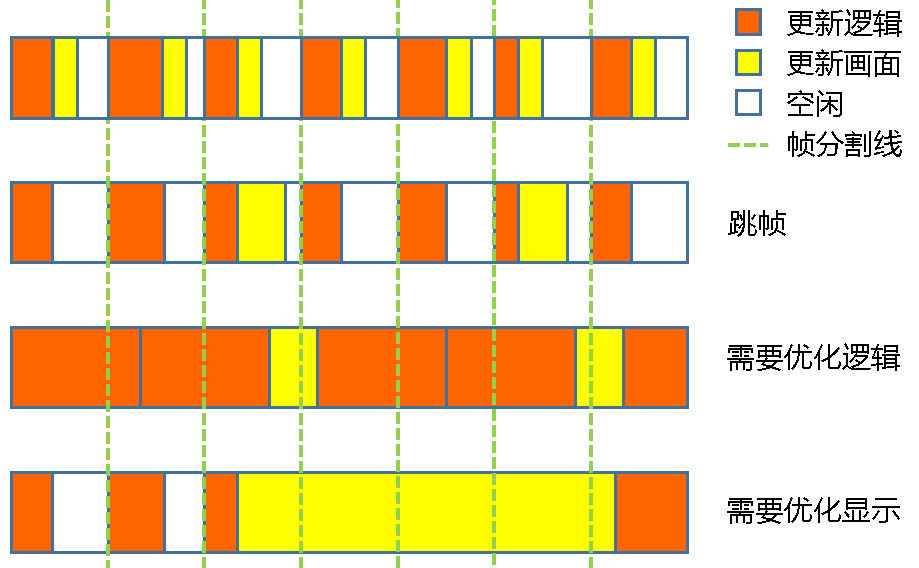
GPU - 专业渲染, 让CPU专注计算
- 中端版 - 支持2D渲染, 贴方块(tiling)
- CPU把方块准备好, 告诉GPU怎么贴(把哪块贴到哪个坐标)
- 高档版 - 支持3D渲染, 有一条渲染流水线
- 顶点, 几何转换, 光栅化, 纹理, 光照…